Capitolo 4
Inferenza Frequentista
L'inferenza frequentista è il processo per determinare le proprietà di una distribuzione sottostante attraverso l'osservazione dei dati.
Stima Puntuale
Uno dei principali obiettivi della statistica è la stima dei parametri sconosciuti. Per approssimare questi parametri, abbiamo scelto un'estimatore, che è semplicemente qualsiasi funzione di osservazioni campionate casualmente
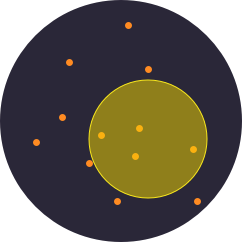
Per illustrare questa idea, stimeremo il valore di \(\pi\) facendo cadere uniformemente i campioni su un quadrato contenente un cerchio inscritto. Si noti che il valore di \(\pi\) può essere espresso come un rapporto di aree. $$\begin{matrix}S_{circle} = \pi r^2\\S_{square} = 4r^2\end{matrix} \implies \pi = 4 \frac{S_{circle}}{S_{square}}$$ Possiamo stimare questo rapporto con i nostri punti. Sia \(m\) il numero di osservazioni all'interno della cerchio ed \(n\) il numero totale di punti scelti nel quadrato. Noi definiamo il nostro stimatore \(\hat{\pi}\) come: $$\hat{\pi} = 4 \frac{m}{n}$$ Si può dimostrare che questo stimatore ha due proprietà desiderabili: imparziale e coerente .
|
\(m=\) 0.00 \(n=\) 0.00 |
\(\hat{\pi}=\) |
Intervallo di Confidenza
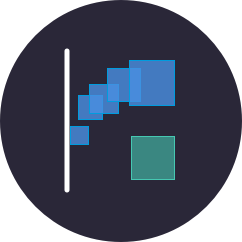
Al contrario degli stimatori puntuali, gli intervalli di confidenza stimano un parametro specificando un intervallo di valori possibili. Tale intervallo è associato a un livello di confidenza, che è la probabilità che la procedura utilizzata per generare l'intervallo produca un intervallo contenente il giusto parametro.
Scegli una distribuzione di probabilità da cui campionare.
Definisci la dimensione del campione \((n)\) e il livello di confidenza \((1-\alpha)\).
Inizia il campionamento per generare gli intervalli di confidenza
Questa visualizzazione è un adattamento della fantastica rappresenzatione degli intervalli di confidenza di Kristoffer Magnusson.
Bootstrap
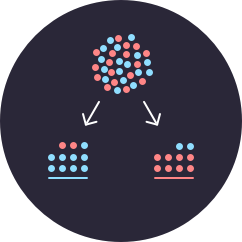
Gran parte dell'inferenza frequentista si incentra sull'uso di stimatori "buoni". Le distribuzioni precise di questi stimatori, tuttavia, possono spesso essere difficili da ricavare analiticamente. La tecnica computazionale nota come Bootstrap fornisce un modo conveniente per stimare le proprietà di uno stimatore tramite il ricampionamento. In questo esempio, ricampioniamo con la sostituzione dalla funzione di distribuzione empirica (generata dal campionamento dalla popolazione) per stimare l'errore standard della media campionaria.
Scegli una distribuzione di probabilità da cui campionare per generare la funzione di distribuzione empirica.
Definisci la dimensione \((n)\) di un campionamento (e ricampionamento) e usalo della distribuzione scelta.
Ricampionamento per avere un'idea della diffusione della distribuzione del mezzo campione.